
Work in progress
Nicolas Correal Murillo


A smooth sea never made a skilled sailor.
A smooth sea never made a skilled sailor.
Work

Full showcase
Mars Rover · Mechanical · Electronics · Leadership
Led a team of 12 engineers to design, build, and compete internationally with a Mars rover — built entirely from scratch in under 10 months. Spearheaded the development of custom hand-wound brushless motors with internal cycloidal drives, a 6-DOF robotic arm, and the overall mechanical and electronics design vision. Secured funding to travel and compete internationally. Qualified in the top 15 out of 113 teams, finishing 21st overall.

Full showcase
Mars Rover · Electronics · Robotic Arm
Led the electronics team for a competitive Mars rover project, overseeing full system integration and driving the design and development of the robotic arm subsystem.

Quadruped · Thesis · Reinforcement Learning
My undergraduate thesis: designing and building a custom quadruped robot from the ground up, analyzing gait quality across different motion patterns, and training a locomotion policy using reinforcement learning in NVIDIA Isaac Sim.
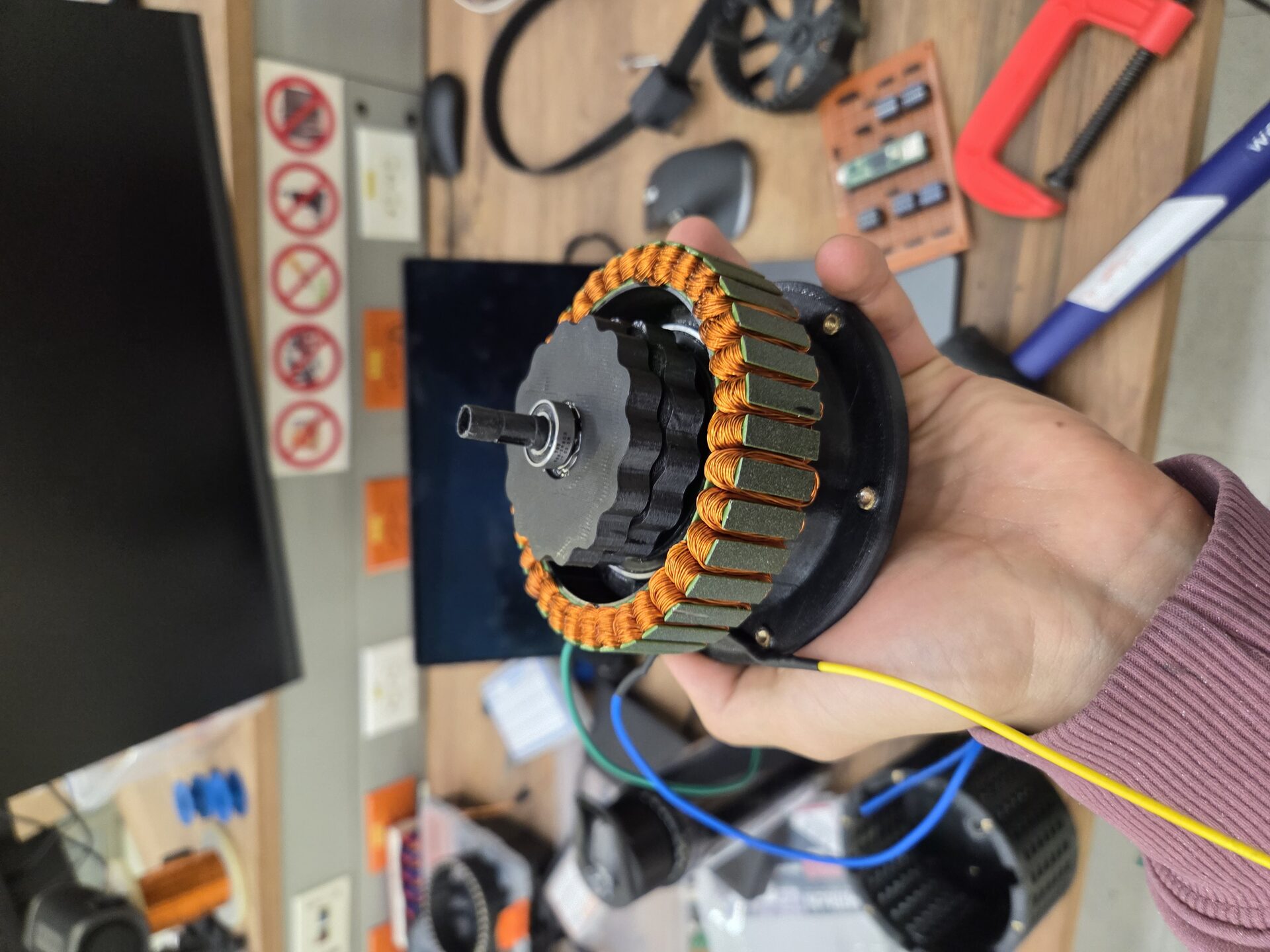
Actuators · Motor Design · Mechanical
Hand-wound custom brushless motors featuring both single and double-stage cycloidal reduction drives, optimized for space efficiency, power density, and material use — purpose-built for deployment in a Mars rover.